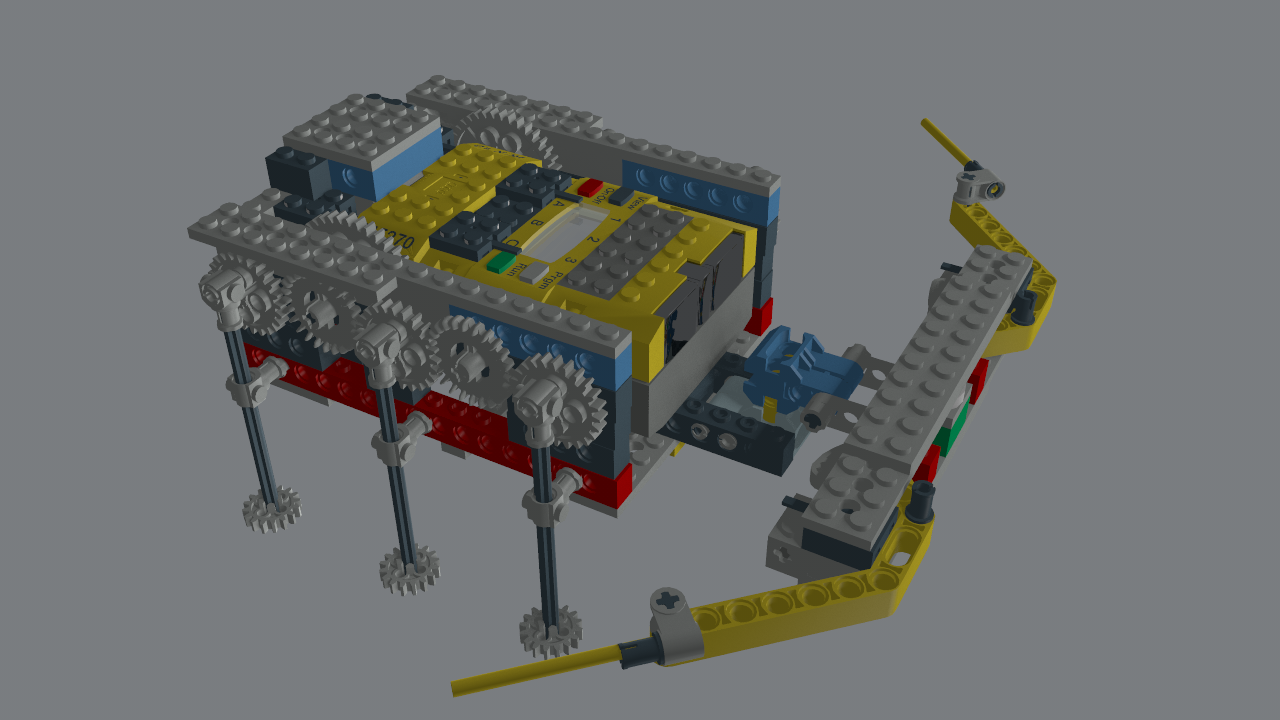
I have made my first attempt at a six legged walker (a hexapod) with Lego.
Up until now all of my robot designs have been more concerned about behaviour. Although these have not been posted yet they are older than the site.
This was built for pure aesthetics. I think wheels, tracks and tri-star wheels are more efficient than six legs but I thought it interesting to try.
So I attempted a number of designs and finally settled on the most simple.
The design
The motion is based on a cam oscillator using only two motors, giving it motion but not full leg articulation. It is controlled with skid-steering as if it had any other drive base.
The design, like my other designs was created in two halves which clip together, and the RCX was placed over them.
Admittedly I would also like to modify it further to hold the RCX in more rigidly.
The chassis needed some clearance from the ground for the legs to work, but this has also caused it to be a little top heavy so the bot walks awkwardly.
The walking is provided by the 5 gear chain of 24 tooth sprockets on each side. To save pieces I have used 24 tooth crown sprockets with the other sprockets, but you will need at least 6 normal ones- as these are used to drive the legs.
Note that I have geared each of the motors down from a 8 tooth to a 40 tooth (5:1). Otherwise you have a good chance the motors will not turn. In my next revision, I will try a worm gear based drive mounted along the length instead.
I use 16 tooth gears as feet for the legs.These give more grip than using bushes or bare axles.
I considered using tires but they add to the weight which is already a problem. Warning, this bot drains batteries!
- Download the LDraw design file
- I recommend LeoCAD for viewing and editing the design.
The touch sensor
It uses my modified extra wide version Lego’s own design of sensor mount on the front.
This can make the robot too heavy on the front and unstable.